Shoulder Mechanism
3D Printed Star Wars R2-D2 R6 Droid
This page is about the 3D Printed Shoulder Mechanism, check out the main project index for the rest.
There is a YouTube video about this section



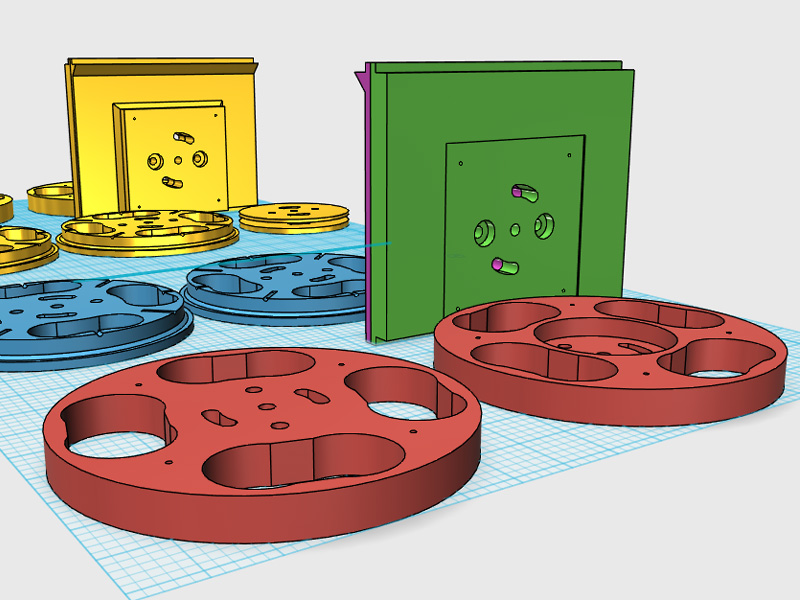
The shoulder plates will be mounted in the corresponding recesses in the frame. The leg itself will be mounted on the hub shown in red below, which is printed in two parts. Both inner (red) and outer (blue) hubs will be mounted on 100mm lazy susan bearings which are compressed together through the green/pink plate. This will remove most of the bearing ‘rattle’ as well as improving stability:


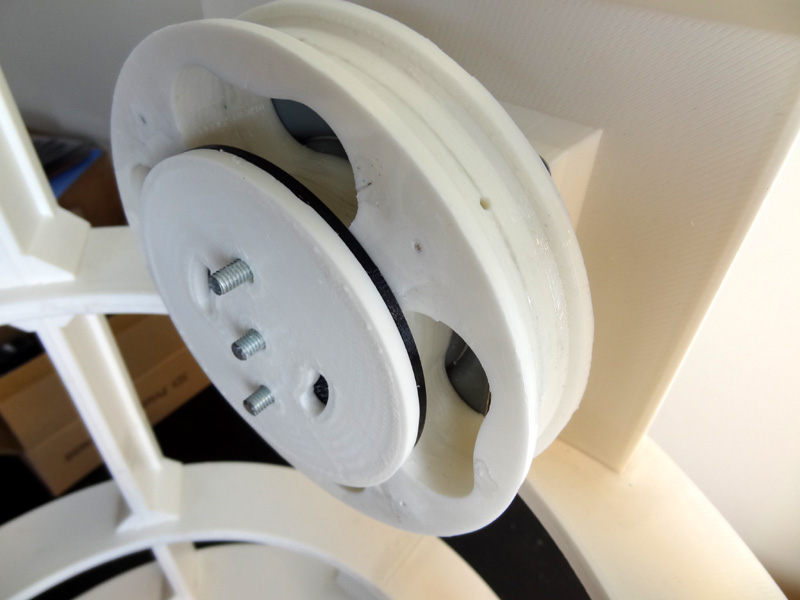
A few pictures of the assembly. The studding sections compress the inner and out hubs together – as well as providing end stops so the leg can only rotate 36′. Two fixed sections of studding will also provide the rods to keep the feet parallel as the conversion from 2/3/2 legs takes place:






The shoulders are driven by belts and pulleys which are anchored onto the large shoulder hubs – these only need to turn 36′ which is a small part of the pulley.

The motors are highly reduced and worm gear driven which allows 36′ of rotation to take place in about 6 seconds:


The shoulders are now driven by chains and sprockets!:


Related Posts




About The Author
James Bruton
My name is James Bruton, I live in Southampton, UK. Please note that this is my personal project website, I have no products for sale, most of the information is provided so that you can have a go yourself... Read More